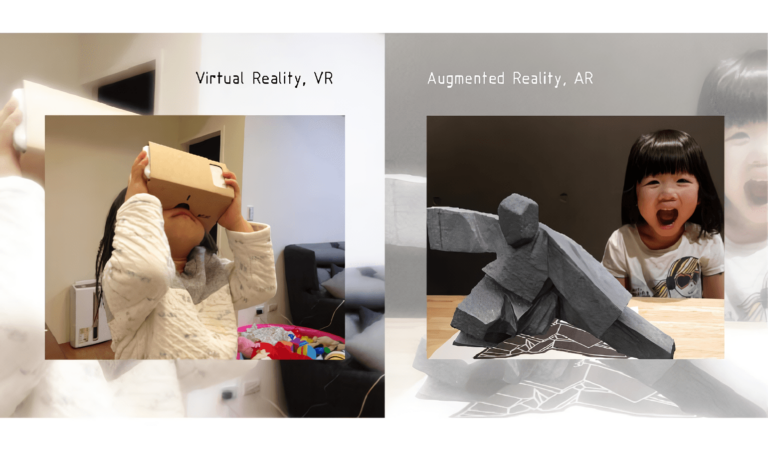
iPhone12的LiDAR是什麼?跟AR、 Structured light有什麼不同?
AR、Structured light 和 LiDAR 的目的都是在獲取距離資訊,量測物體距離手機有多遠的距離。這些裝置會與相機連結,當一整張相片範圍中的每一個位置都取得了距離資訊,這張照片我們就稱為深度照片;也就是說照片不再是平面的,而成為了3D照片。除了平面的顏色變化之外(X,Y)還有了深度資訊(Z)。
深度照片
深度照片能夠做什麼用呢?iPhone用戶熟悉的人臉解鎖功能就是利用深度照片來判讀人臉的。利用深度相片建立了人臉的三維模型,透過比對人臉的三維表面模型,來確定是否為同一個人。
可是上一代的iPhone沒有LiDAR就可以三維比對人臉了啊?而且其他品牌的手機也有類似的人臉辨識功能啊?這是因為拍攝深度相片並不是只有一種方式才能達成,目前常見的方法有三種,可以快速地取得深度照片:AR、 Structured light 和 LiDAR,我們將就後兩種作解釋。
Structured light
中文稱為結構光,它的基本原理是使用測量學中的前方交會法;左側架設一台光源投射機,右側側架設一台相機(左右可互換,以下所有的左右分析都將隨之改變),在測距任務進行時,光源投射機投出光點至人臉上,相機將人臉與投影的光點拍攝起來。
光源投射機投射出的光點,當投射至人臉上之後,光點的位置在右側相機所看到的視角,將隨著臉上特徵的遠近而有偏右或偏左的現象(請參考下圖)。光點投射的距離越遠,照片上光點的位置將會偏右,投射的越近則會偏左。
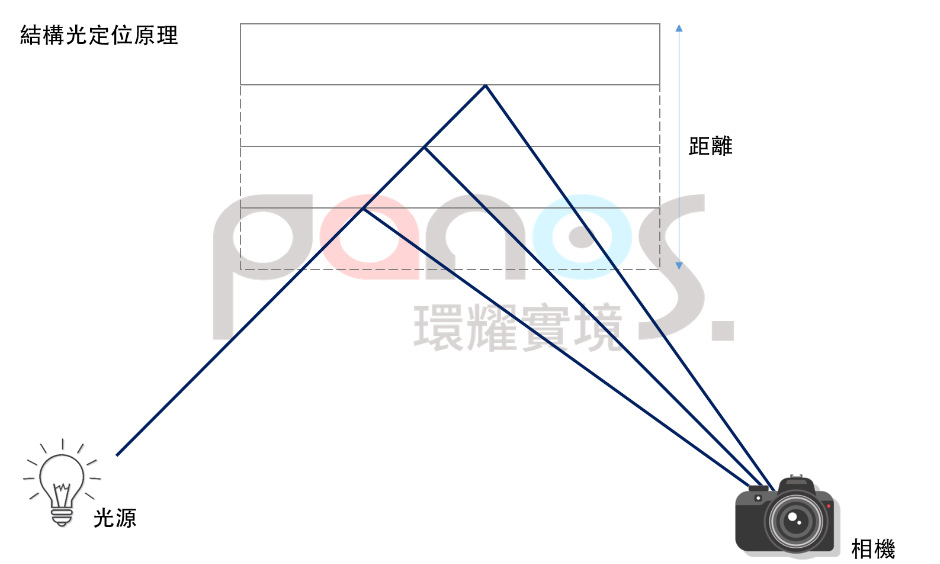
由於光線射出的角度以及相機架設的角度都是固定在手機上的,光點的偏移量便可以直接計算出深度差異值,進而計算出相對的距離。附帶一提,這個投射的光點一般使用紅外線波段,所以人眼是看不見的,但是只要把房間燈關了,拿出你的手機對著投射出來的範圍拍攝一下,就會發現神奇的隱形光點出現了~
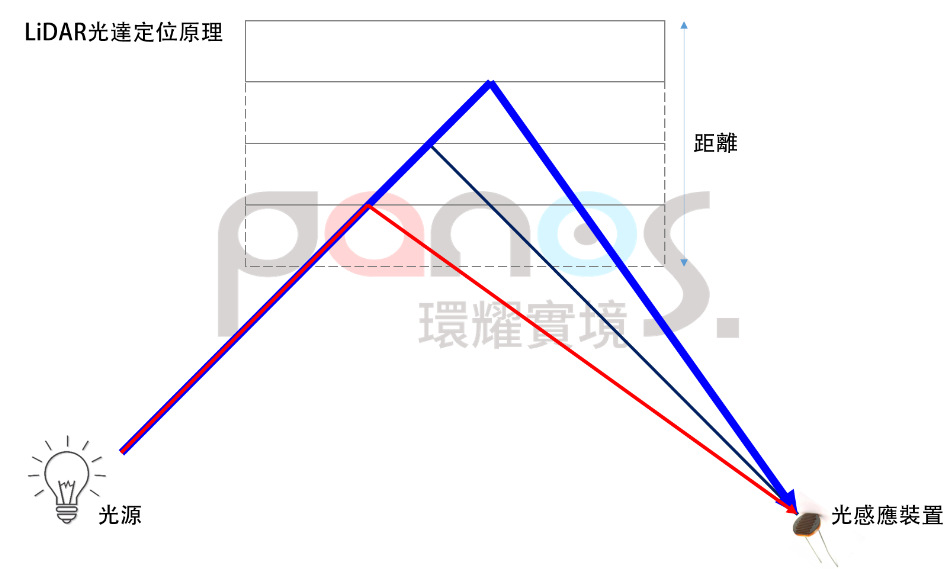
LiDAR ( Light Detection And Ranging )
中文稱為光達或雷射掃描儀。一台雷射光發射裝置打出特定角度的雷射光點,光點投射到人臉上後反射到光感應裝置,如果光點打到人的鼻頭,就會離手機比較近,所以這條光線所行走的路徑就比較短(下圖中的紅線),如果光點打到比較遠的後方牆上,光線行走的路徑就會比較長(下圖中的藍線)。
由於光在空氣中的速度是恆定的,也就是大約每秒鐘前進300,000,000公尺,可以計算雷射光點啟動的時間與感應到光線反射回來的時間差,就可以計算出手機與鼻頭之間的距離(別忘了光線一去一回,距離是兩倍喔)。
由於LiDAR是接收特定光線波段的訊號,一點光點射出去反射回來接收到之後,才能再發射第二道光線出去,所以LiDAR是屬於逐點掃描的形式,而前述的結構光是整面同時打出很多個光點,原理有不小的差異。
看完了原理說明,我們來考考各位看看大家是不是真的看懂了呢?我們知道只要是測量一定會有誤差,拿一把尺去量一段長度,十個人去量可能會有十種不同的長度。
一般來說,量測對象的距離越短誤差越小,量測距離越長誤差越大。但是上述的兩種方法當中,其中有一種不屬於這種情形喔,不管量測多長的距離,距離誤差都差不多喔~你猜得出來是哪一種嗎?答案在下一篇公布~